디자인 특징
● 클로즈 루프, 에어로텍의 AGV 스캐너 시리즈를 위한 2축 서보 드라이브
● IFOV는 AGV와 서보 모션을 완벽하게 결합하여 스캐너 작업 영역을 확장
● “제로 트래킹 에러"의 완벽한 서보 상태 제어 기능으로 원의 necking이나 모서리 rounding과 같은 속도 관련 파트 왜곡을 제거
● HyperWire 광섬유 인터페이스
● 모드 락 레이저와 동기화를 위한 외부 클럭 입력
● 위치 기반 레이저 발사 (PSO) 기능은 광범위한 작동 속도에서 일관된 스팟 간격을 유지합니다
| 
|
GL4는 에어로텍의 AGV 스캐너 제품군을 제어하기위한 최적화된 플랫폼을 제공합니다. 모든 상태의 피드포워드, 192 kHz의 서보 속도 및 미리보기 기반의 속도 제어와 같은 고급 기능으로 인해 업계 최고의 안정화 시간, 장기적인 열 안정성 및 미크론 레벨의 트래킹 정확도를 자랑합니다.
고해상도 피드백
AGV-HP는 가상의 게인 또는 오프셋에 변화가 없는 열적으로 안정적인 피드백 변환기를 가지고 있습니다. GL4는 고급 보간 전자 장치를 사용하여 최대 26 비트의 유효 해상도를 제공합니다. 실시간 2D 보정을 통해 FOV에서 정확한 빔 위치를 보장합니다.
Position Synchronized Output (PSO)
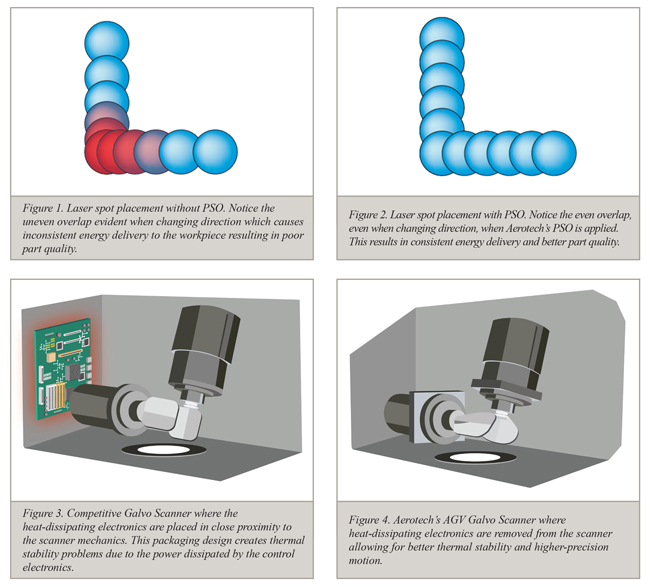
레이저 스팟의 X/Y 축을 위치 함수로 정확하게 배치하는 기능은 레이저 가공 어플리케이션에서 에어로텍 선형 위치 결정 테이블의 핵심 기능입니다. (그림 1 및 2 참조) GL4가 출시됨에 따라 스캐너 응용 프로그램에서 이 기능을 사용할 수 있습니다. 레이저를 위치 함수로 정확하게 트리거링하는 기능은 마크, 점프 및 다각형 지연을 프로그래밍 할 필요가 없으므로 프로그래밍의 복잡성이 줄어 듭니다. Position Synchronized Output 기능을 사용함으로써 스캐너 기반 프로세스를 기존 X/Y 스테이지 기반 응용 프로그램과 동일한 방식으로 프로그래밍 할 수 있습니다.
원격 전원 장치
대부분 경쟁사의 스캐너는 갈보 및 피드백 장치와 함께 헤드에 직접 통합된 전원 장치를 갖추고 있습니다. 이러한 전원 장치는 스캐너 헤드에 상당한 열 에너지를 주입하여 피드백 위치에서 드리프트를 일으키고 미러 간의 오프셋을 변경하여 마킹 정확도를 낮추게 되는 원인이 됩니다. 일부 시스템은 열 발생을 최소화하기 위해 PWM 전원을 사용합니다. 그러나, 이러한 접근법은 갈보 모터 및 제어 전류의 극성이 반대로 연결되었을 때 존재하는 비선형 효과로 인해 트랙킹 정확도를 감소시킬 수 있습니다. 스테이지의 전원을 헤드 밖으로 이동시킴으로써 갈보를 구동하는데 더 높은 성능의 트랜지스터를 사용할 수 있으며 열원을 스캐너에서 효과적으로 제거하여 시스템 정확도를 향상시킬 수 있습니다. (그림 3 및 4 참조)
추가 자료
Galvo Calibration File Converter (GCFC) - GCFC를 사용하여 신규 파일 생성, 기존 파일의 최적화 또는 타사 교정 파일을 변환하여 GL4에 적용할 수 있습니다. 에어로텍의 최근 웹 캐스트, Accuracy of Combined Scanning and Servo Systems에 관심이 있을 수 있습니다.
요약: 선형 및 회전 액추에이터는 종종 스캐너/갈보 마킹 헤드의 유효 작업 영역을 확장하는 데 사용됩니다. 이 프리젠 테이션에서는 정렬, 크기 조정, 회전 및 스티칭으로 인한 오류와 최종 부품 품질에 미치는 영향을 함께 논의합니다. 이러한 오류를 최소화하는데 도움이 되는 고급 오류 수정, 경로 계획 및 레이저 트리거링 기술도 논의될 것입니다.
보관된 프레젠테이션에 접근하려면 여기를 클릭하세요.
|
|
Feature
|
Description
|
|---|
|
Motor Supply
|
±40 VDC max
| |
Control Supply
|
85-240 VAC; 50-60 Hz
| |
Digital Inputs
|
Four Optically Isolated
| |
Digital Outputs
|
Four Optically Isolated
| |
Analog Inputs
|
One 16-Bit Differential; ±10 V
| |
Analog Outputs
|
Two 16-Bit Single-Ended; ±10 V
| |
Laser Outputs
|
Three Optically Isolated; 3 TTL
| |
Emergency Stop Sense Input (ESTOP)
|
Standard; 24 V Opto-Isolated
| |
Position Synchronized Output (PSO)
|
Standard * Two-axis PSO * Three-axis Part-Speed PSO | |
Interpolated Feedback Output
|
Yes
| |
Communication Bus
|
HyperWire® fiber-optic interface
| |
Operating Temperature
|
0 to 50°C
| |
Storage Temperature
|
-30 to 85°C
| |
Weight
|
2.9 kg
| |
Standards
|
CE Approved; NRTL Safety Certification; 2011/65/EU RoHS 2 Directive
|
|







 GL4 High-Performance Galvo Drive
GL4 High-Performance Galvo Drive
